
Lei Deng, Guihua Liu, Huiming Huang, Hao Deng, Wei Rao, Tianci Liu. Stereo Matching of Binocular Multi-Line Laser Stripes Based on Regional Consistency and Voting Scoring Mechanism[J]. Acta Optica Sinica, 2025, 45(5): 0515002
- Acta Optica Sinica
- Vol. 45, Issue 5, 0515002 (2025)
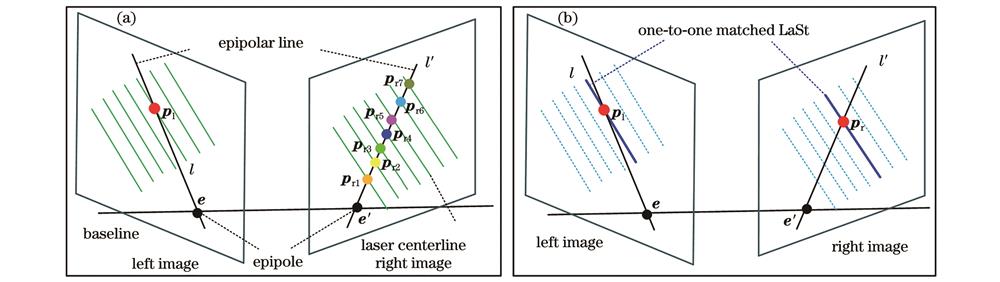
Fig. 1. Comparison of laser point matching methods. (a) Matching based on epipolar constraint; (b) proposed matching method

Fig. 2. BMLL 3D reconstruction process. (a) BMLL 3D reconstruction system; (b) laser line image; (c) single-frame reconstruction result
Fig. 3. Diagram of registration process in BMLL 3D reconstruction system. (a) BMLL 3D reconstruction system; (b) global marker point library construction; (c) local view reconstruction and global registration
Fig. 4. Schematic diagram of LaSt matching algorithm flow
Fig. 5. Linear calibration diagrams. (a) LaSt image; (b) LaSt centerline extraction; (c) LaSt center point classification
Fig. 6. Example of matching of left LaSt and right LaSt. (a) Left LaSt image; (b) left LaSt line fitting; (c) right LaSt image; (d) right LaSt line fitting
Fig. 7. Schematic diagrams of laser plane calibration. (a) Laser point reconstruction results; (b) laser plane fitting results
Fig. 8. Diagrams of RC characteristics. (a) Distribution of LaSt within degree-of-freedom (DoF) range; (b) spatial correspondence of laser points in two views
Fig. 9. Diagram of coarse matching process. (a) Left image; (b) right image; (c) rectangular boxes centered at
Fig. 10. Reverse matching diangrams. (a) LaSt and centerline images; (b) laser point classification results; (c) forward matching results; (d) reverse matching results
Fig. 11. Experimental device and tested objects. (a) BMLL 3D reconstruction system; (b) partial experimental objects I; (c) partial experimental objects II; (d) plane calibration plate; (e) circular calibration plate
Fig. 12. Comparative experimental results of different LaSt. (a) Continuous variation; (b) monotonic variation; (c) non-monotonic variation
Fig. 13. Reconstruction results of LaSt with different matching methods. (a) Continuous variation; (b) monotonic variation; (c) non-monotonic variation
Fig. 14. Comparison of results of laser point matching
Fig. 15. Measurement results of standard spheres. (a) Standard sphere device; (b) single reconstruction and fitting results; (c) reconstruction error of 3D sphere model; (d) sphere center distance
Fig. 16. Matching results of LaSt in experimental scenario 1. (a) Scene 1; (b) reconstruction results; (c) LaSt and centerline; (d) classification results of laser points; (e) matching results
Fig. 17. Matching results of LaSt in experimental scenario 2. (a) Scene 2; (b) reconstruction results; (c) LaSt and centerline; (d) classification results of laser points; (e) matching results
Fig. 18. Experimental results for 1.3 million pixel camera and 8 mm lens. (a) Hardware configuration 1; (b) reconstruction results; (c) LaSt and centerline; (d) classification results of laser points; (e) matching results
Fig. 19. Experimental results for 5 million pixel camera and 12 mm lens. (a) Hardware configuration 2; (b) reconstruction results; (c) LaSt and centerline; (d) classification results of laser points; (e) matching results
|
Table 1. LaSt matching effect of different methods
|
Table 2. Time consumption of each module


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20