1Huazhong University of Science and Technology, PGMF and School of Physics, MOE Key Laboratory of Fundamental Physical Quantities Measurements, Hubei Key Laboratory of Gravitation and Quantum Physics, Wuhan, China
2National Institute of Metrology, Beijing, China
3Nanchang Hangkong University, Key Laboratory for Optoelectronic Information Perception and Instrumentation of Jiangxi Province, Nanchang, China
4Chinese Academy of Sciences, State Key Laboratory of Applied Optics, Changchun Institute of Optics, Fine Mechanics and Physics, Changchun, China
【AIGC One Sentence Reading】:We present a chirped pulse interferometry for ultrafast, precise distance measurement, achieving ±2 μm uncertainty with no dead zones.
【AIGC Short Abstract】:We present a chirped pulse interferometry-based ranging scheme, eliminating dead zones and achieving ±2 μm measurement uncertainty. With real-time detection, it offers ultrafast speed, high precision, and large ambiguity range, using just one comb source, promising for future field applications.
Note: This section is automatically generated by AI . The website and platform operators shall not be liable for any commercial or legal consequences arising from your use of AI generated content on this website. Please be aware of this.
Abstract
Laser frequency combs, which are composed of a series of equally spaced coherent frequency components, have triggered revolutionary progress in precision spectroscopy and optical metrology. Length/distance is of fundamental importance in both science and technology. We describe a ranging scheme based on chirped pulse interferometry. In contrast to the traditional spectral interferometry, the local oscillator is strongly chirped which is able to meet the measurement pulses at arbitrary distances, and therefore, the dead zones can be removed. The distances can be precisely determined via two measurement steps based on the time-of-flight method and synthetic wavelength interferometry, respectively. To overcome the speed limitation of the optical spectrum analyzer, the spectrograms are stretched and detected by a fast photodetector and oscilloscope and consequently mapped into the time domain in real time. The experimental results indicate that the measurement uncertainty can be well within ±2 μm, compared with the reference distance meter. The Allan deviation can reach 0.4 μm at 4 ns averaging time and 25 nm at 1 μs and can achieve 2 nm at 100 μs averaging time. We also measured a spinning disk with grooves of different depths to verify the measurement speed, and the results show that the grooves with about 150 m / s line speed can be clearly captured. Our method provides a unique combination of non-dead zones, ultrafast measurement speed, high precision and accuracy, large ambiguity range, and only one single comb source. This system could offer a powerful solution for field measurements in practical applications in the future.
During the past two decades, laser frequency combs have achieved huge success in a vast number of applications, e.g., absolute frequency measurement, precision spectroscopy, optical clock, communications, astronomy, and absolute distance measurement.1,2 This kind of comb laser features a series of coherent peaks with equal space in the frequency domain and exhibits a pulsed nature in the time domain. There are two degrees of freedom, the repetition frequency and the carrier-envelope-offset frequency , to characterize the laser frequency combs, and one single line can be expressed as . is an integer. As long as and are locked to the external frequency reference, laser frequency combs can serve as a precise and accurate ruler both in the frequency and time domains.3 Several mechanisms are able to stimulate frequency combs, such as passive mode-locked lasers, electro-optic modulation,4,5 and nonlinearity evolution in micro-resonators.6,7 To date, all these kinds of laser frequency combs can be self-referenced to an external frequency reference.
Since the first demonstration in 2000,8 frequency comb-based absolute distance measurements have developed for over 20 years, and various schemes have been investigated in great depth, such as inter-mode beat,8–10 pulse cross-correlation,11–18 dual-comb interferometry,19–28 multi-heterodyne interferometry,29 pulse-to-pulse alignments,30,31 and stationary phase evaluation.32,33 In addition, frequency combs can also work as a reference source when one or more continuous wave lasers are used to measure absolute distances. The problem may be that the whole system involves multiple optical sources to increase the system cost and complexity.34–36 Very recently, optical ranging with microcombs has attracted the interest of scientists due to their small footprint and low power consumption. All the methods mentioned above can be used to measure the distances using the soliton micro-combs, and the attempts of the pulse cross-correlation,18 dual-comb interferometry,37,38 and dispersive interferometry have already been reported.39,40 To date, the physics of the microcombs is becoming clear, but the long-term reliable operation of the soliton state is still relatively challenging. In addition, the commercialization of the microcombs needs to be accelerated. For any kind of measurement method, there are several parameters to evaluate their performance, including precision/accuracy, ambiguity range, measurement speed, and system cost.20,31 Generally speaking, improvement in one parameter is achieved at the exchange of degradation in other parameters.
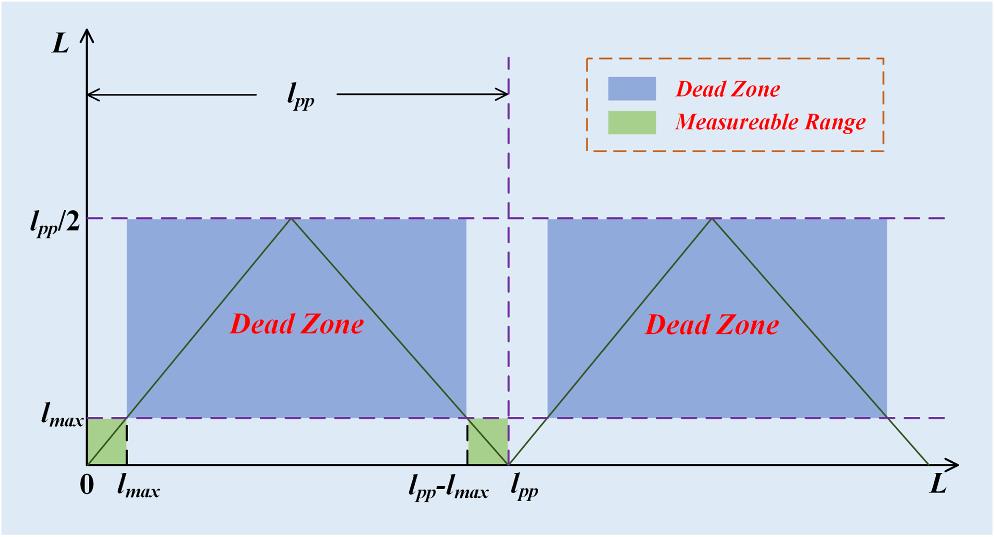
One important group among these methods is spectral interferometry, also known as dispersive interferometry, in which the spectrum will be modulated when the pulses interfere with each other.41 In this case and often, an optical spectrum analyzer (OSA) is exploited to measure and hold the spectrograms. The following data process including the Fourier transform and the phase unwrapping can extract the distance information. Yet, limited by the resolution of the OSA, the spectrograms can not be reconstructed anymore when the pulse-to-pulse interval is too large.42,43 This means that there are dead zones along the measurement path, as shown in Fig. 1. In practical applications, the dead zone is one of the limitations for distance measurement in pulse interferometry. For example, in the positioning for autonomous driving, if there are dead zones in the measurement path, blind spots exist that are not safe for traffic. To overcome this limitation, a virtual imaging phase array (VIPA) and a grating can be used to disperse the light in a two-dimensional plane, and a CCD camera can consequently image each mode.44 This scheme can be considered homodyne interferometry with a number of wavelengths, and the dead zones can be therefore removed. However, the frequency comb with a larger repetition frequency (e.g., 1 GHz) is needed; otherwise, the individual mode cannot be resolved. It is necessary to mention that the problem of the dead zone can be relaxed if using the electro-optic combs4,25 or the micro-combs37,38 because the repetition frequencies of these combs are inherently large over tens of GHz. Therefore, the pulse-to-pulse interval is relatively small. In addition, for spectral interferometry, the small distances of and in the vicinity of cannot be directly distinguished.41 The symbols + and − represent the positions before and after the reference pulse, respectively; is an integer; and is the pulse-to-pulse length of the frequency comb.
Sign up for Advanced Photonics Nexus TOC. Get the latest issue of Advanced Photonics Nexus delivered right to you!Sign up now
Figure 1.Dead zones in the distance measurement when using chirped pulse interferometry. represents the pulse-to-pulse interval and is equal to . is the light speed in vacuum, is the group refractive index of air, and is the repetition frequency of the frequency comb. is the measurable distance of chirped pulse interferometry, which is determined by the resolution of the OSA.
Another problem with using the CCD-based OSA is that the measurement speed is limited by the frame rate of the camera, which is only about kfps in general. Similarly, the speed of the OSA based on the long translation stage is determined by the moving speed of the mechanical stage.32 In recent years, a new kind of real-time OSA has found a number of applications, which relies on the theory of dispersive Fourier transform (DFT),45,46 also referred to as time stretch. In DFT, the femtosecond pulses are greatly stretched and then detected by a fast photodetector and a fast AD card. Now, the technique of time stretch has been used in the fields of optical ranging,47,48 imaging,49 spectroscopy,50–52 intelligent control of the pulses,53 and ultrafast phenomenon observation.54–59 In the case of long-distance measurement using time stretch-based dispersive interferometry, the spectrograms in the frequency domain can be translated into the time domain, and more important the measurement speed is directly determined by the repetition frequency of the pulsed laser, which can be as high as several nanoseconds per measurement.60,61 However, limited by the bandwidth of the photodetector and the AD card, the spectrograms cannot be reconstructed either for this new type of OSA when the distance is too large. This means that the dead zones still exist in the measurement path, as shown in Fig. 2(a).
Figure 2.Frequency comb interferometry in the frequency domain. (a), (b) In traditional spectral interferometry, the spectrum will be modulated and the modulation frequency is constant along the wavelength axis, e.g., the situations 2 and 3. Note that the spectrograms corresponding to the situations 2 and 3 are the same, despite that the distances are different. Limited by the resolution of the OSA, the spectrograms cannot be reconstructed when the distance is too large, e.g., the situation 4; (c), (d) Chirped pulse interferometry will occur when the reference pulses are chirped. The modulation frequency of the spectrograms is not constant, e.g., the situation 1, and there is a widest fringe. When the distances are changed, the position of the widest fringe changes, e.g., the situations 2 and 3. Note that the spectrograms corresponding to the situations 2 and 3 are not the same. Similarly, the spectrograms cannot be reconstructed when the distance is too large, e.g., the situation 4; (e), (f) The reference pulse is strongly chirped, and the pulse duration can well cover the pulse-to-pulse interval. The modulation frequency of the spectrograms is larger, and there is no dead zone along the measurement path.
If the reference pulses are chirped by a dispersive element (e.g., a piece of fiber, a pair of gratings, or a piece of glass), chirped pulse interferometry will occur.62,63 Different from the classical spectral interferometry, the modulation frequency of the spectrograms for chirped pulse interferometry is no longer constant.64,65 There is the widest fringe in the spectrograms, where the arm length difference is balanced at the corresponding wavelength.66 Compared with spectral interferometry, the measurable range is expanded. However, the dead zones still exist due to the relatively small dispersion introduced in the reference arm, as shown in Fig. 2(c). If the dispersion amount is sufficiently large, the measurement pulse can always meet the reference pulse in space, and the dead zones can be thus removed in principle, as shown in Fig. 2(e). Considering the measurement speed, we can also use the technique of DFT in chirped pulse interferometry. Nevertheless, the limitation of the bandwidth of the photodetector and the AD card is not very strict, because the widest fringe exists in the spectrograms, whose width remains constant for different distances. By contrast, for spectral interferometry, the modulation frequency linearly increases with increasing distance. Here, we summarize the recent progress in the field of distance measurement in Fig. 3, mostly focusing on spectral interferometry and chirped pulse interferometry. Some reviews can be found in Refs. 67–69.
Figure 3.Recent progress in the field of distance measurement. Note that here we focus on the methods of spectral interferometry and chirped pulse interferometry. Some nice reviews can be seen in Refs. 67–69.
In this work, we describe a method based on real-time chirped pulse interferometry for absolute distance measurement. A highly dispersive fiber is used to broaden the reference pulse. To make sure that the measurement pulses can always overlap with the reference pulse, we change the repetition frequency to adjust the relative delay between the measurement and the reference pulses due to the difference in the pulse index. Therefore, the spectrograms can be always observed along the whole measurement path, and the dead zones can be removed. The distances can be determined via two steps of phase measurements, which are successively the flight time of the pulses and the phase of the synthetic wavelength. In the detection of the spectrograms, we use the highly dispersive fiber to stretch the pulse and real-time detect the spectrograms with the help of fast photodetectors and oscilloscope. In this case, the measurement speed is directly linked to the repetition frequency, up to about 250 MHz (4 ns for one single measurement). The experimental results show that the distances can be measured with high accuracy and precision, high measurement speed, and high resolution.
2 Principles and Methods
The schematic of the measurement principle is shown in Fig. 4. The laser frequency comb, which is locked to the hydrogen maser, is split into two parts. One part is strongly broadened by a highly dispersive fiber, named local oscillator, and the other part is injected into a Michelson interferometer. The pulses reflected by the reference mirror (MR) are named reference pulses, and those reflected by the measurement mirror are measurement pulses. The distance measured is the optical path difference between the measurement arm and the reference arm. The pulses are combined at a beam splitter and finally detected by an OSA. The obtained spectrograms can be used to process to measure the distances.
Figure 4.Schematic of the measurement principle of the chirped pulse interferometry. H, hydrogen maser; MR, reference mirror; MM, measurement mirror; BS, beam splitter; OSA, optical spectrum analyzer. The local oscillator is greatly broadened by a highly dispersive fiber.
Assume that, the spectrum of the frequency comb is . The reference pulse can be expressed as in the frequency domain, and is the power factor. The measurement pulse can be written as , and is the power factor corresponding to the measurement pulse. is the time delay between the reference pulse and the measurement pulse.
The local oscillator can be expressed as , where is the power factor and is the phase change caused by the long dispersive fiber, which can be Taylor expanded as where is the coefficient of the group velocity dispersion at different orders, is an integer, is the center angular frequency, and is the fiber length. The spectrogram corresponding to the reference pulse can be expressed as where is the spectrum of the reference pulse and is the initial phase difference between the reference pulse and the local oscillator. Based on Eqs. (1) and (2), we find that different from the classical spectral interferometry, the spectral phase in the chirped pulse interferometry is not linearly related to , which means that the modulation frequency of the spectrograms is not constant. There will be a “widest fringe” in the spectrograms. Similarly, the spectrogram corresponding to the measurement pulse can be written as where is the spectrum of the measurement pulse. Similar to the principle of dispersive interferometry in Ref. 41, the phase change from Eqs. (2)–(3) can be given by
Therefore, the distances can be determined by where is the light speed in vacuum and is the group refractive index of air. From Eq. (5), we finally reach an expression related to the phase slope, exactly the same as spectral interferometry and dual-comb interferometry. This step is actually to measure the distance by time-of-flight method. As mentioned before, we try to efficiently remove the dead zones in the measurement path, and the spectrograms with one widest fringe shall be observed at any distance, as long as the dispersion is sufficiently large to cover the pulse-to-pulse length of the comb source [i.e., ]. In this work, the repetition frequency is about 250 MHz. In addition, the ambiguity range can be easily expanded to the kilometer level by slightly changing the repetition frequency. To make this idea more clear, the comparison between the spectral interferometry and the chirped pulse interferometry with chirp rate is shown in Fig. 5. We find that the method based on the phase slope can be universally used in the comb-based distance measurement, e.g., spectral interferometry, dual-comb interferometry, and chirped pulse interferometry.
Figure 5.Comparison between the spectral interferometry and the chirped pulse interferometry. (a) Spectrogram in the spectral interferometry with 0.4 mm distance. (b) Spectrogram in the spectral interferometry with 0.5 mm distance. We find that the fringe will be modulated when the distance is not zero, and the modulation frequency increases with increasing the distance. (c) Unwrapped phases for the 0.4 and 0.5 mm distances, respectively. The unwrapped phase increases linearly with increasing the optical frequency. (d) Phase difference between the phases in panel (c). The distance can be determined by the phase slope. (e) Spectrogram in the chirped pulse interferometry with 0.4 mm distance. (f) Spectrogram in the chirped pulse interferometry with 0.5 mm distance. We find that the modulation frequency of the fringe is no longer constant. The position of the widest fringe is shifted when changing the distance. (g) Unwrapped phases for the 0.4 and 0.5 mm distances, respectively. The unwrapped phase is not linearly but quadratically correlated with the optical frequency. (h) Phase difference between the phases in panel (g). We find that the phase difference is still linearly related to the optical frequency, and the distance can be also determined by the phase slope.
In principle, the pulse duration (not the full width at half maximum) should be broadened to about to make sure that the pulses can always meet each other in space, to further remove the dead zones. In this case, extremely long fiber is required, and the stabilization of such a long fiber is not easy (In fact, we used the 300-m long fiber to perform the distance measurement in our experiments, see Ref. 70). Although the long fiber can be stabilized using cavity-stabilized laser, the system would become complicated and more expensive. In this work, we use a relatively short fiber (90-m long fiber) and change the repetition frequency of the frequency comb to ensure that the pulses can always overlap at arbitrary distances.71 Consequently, the measurement principle will be slightly updated. The spectrogram corresponding to the reference mirror can be expressed as Eq. (2) when the current repetition frequency is . Here, the length difference between the reference pulses and the local oscillator can be calculated as where is the pulse index difference between the pulses, which is related to the fiber length and the index. In Eq. (6), the first term at the right side is the integer part of the pulse-to-pulse interval, i.e., , due to the pulsed nature of the comb laser. The second term is the fractional part .
In the case of the target mirror, the repetition frequency shall be increased to generate the spectrograms again [expressed as Eq. (3)], and the updated repetition frequency is . Consequently, we can calculate the length difference between the measurement pulses and the local oscillator as where is the fractional part.
Therefore, the measured distance (i.e., the difference between and ) can be calculated as
We measure the distance by two steps. In the first step, the distances can be coarsely measured with a larger uncertainty based on Eq. (8). Further, we use synthetic wavelength interferometry to measure the distance. Because laser frequency comb is composed of numerous wavelengths, two wavelengths can be picked up to form a virtual synthetic wavelength, and the distances can be expressed as where is the integer part, is the fractional part of the synthetic wavelength, and is the group refractive index. The synthetic wavelength can be calculated as where and are the chosen wavelengths. can be written as where and are the corresponding phase refractive indices of air. Please note that the access condition from the first step to the second step is the measurement uncertainty of the first step is smaller than half the synthetic wavelength to obtain the right integer . Finally, the distances can be finely determined by the two cascaded steps.
The experimental setup is shown in Fig. 6, which actually comprises two interferometers, i.e., the frequency-comb interferometer and the He-Ne interferometer. In the frequency-comb interferometer, the comb source (Menlosystems FC1500, 1560-nm center wavelength, about 250-MHz repetition frequency, 20-MHz carrier-envelope-offset frequency, 30-mW output power), locked to the Hydrogen maser (T4 Science iMaser 3000, @ 1s stability), is amplified by an Er-doped fiber amplifier to 130 mW and then split into two parts. One part is broadened by a highly dispersive fiber (90-m dispersion compensation fiber) and works as the local oscillator. The other part goes into a Michelson interferometer and serves as the signal source. The optical path difference between the reference arm (reflected by the reference mirror) and the measurement arm (reflected by the measurement mirror) is the distance to be determined. The target mirror is fixed on a PC-controlled carriage. The signal source and the local oscillator are combined at a beam splitter, and consequently, we can obtain two spectrograms. One is formed by the reference pulse and the local oscillator, and the other corresponds to the measurement pulse and the local oscillator. These two spectrograms are split by a polarization beam splitter and then injected into the highly dispersive fiber (2.5-km dispersion compensation fiber) to significantly stretch the spectrograms, respectively. Please note that the lengths of the two dispersive fibers should be well-matched. Two fast photodetectors (Keyang KY-PRM-50G, 50 GHz bandwidth) are used to detect the spectrograms, and a high bandwidth oscilloscope (LeCroy WaveMaster 820Zi-B, 20 GHz bandwidth, sampling rate) is exploited to measure and store the waveforms, which can be processed to extract the distance information. Please note that a sinusoidal signal of about 250 MHz (corresponding to the current repetition frequency), which is locked to the Hydrogen maser, is used to trigger the oscilloscope.
To evaluate our results, a commercial distance meter (Renishaw XL80) is used to measure the same distance simultaneously in the He-Ne interferometer, as depicted in Fig. 6. The target corner retroreflector of the commercial distance meter is fixed on the same carriage. Because the continuous-wave counting interferometer can only measure the incremental distances, we use the distance variations measured by our system to compare with the reference values. At the initial position, the reference distance meter is reset to zero, and we can measure an absolute distance of . Then, the target mirror is moved far away from the beam splitter. The reference distance meter can measure the distance increment , and meanwhile, the updated absolute distance of can be determined by our system. Consequently, can be used to compare with the reference value of . The environmental conditions are well controlled and measured, which can be used to calculate the air refractive index based on the empirical equations. To suppress the possible cosine error in long-distance measurement, both the measurement beams of the He-Ne interferometer and the frequency comb interferometer are carefully aligned to be parallel to the optical rail. The Abbe offset between the targets of the He-Ne interferometer and the frequency-comb interferometer (i.e., the separation between the targets) is less than 100 mm.
3 Results
3.1 Mapping from the Frequency Domain to the Time Domain
The precise mapping from the frequency domain to the time domain, i.e., from frequency to time is required in the practical measurement, which is determined by the parameters and the stability of the long dispersive fiber, the stability of the oscilloscope, and the signal-to-noise ratio of the time-domain signal. Please see the Appendix for more information. Unfortunately, the parameters provided by the fiber manufacturer are too rough to use. In this step, we measure the spectrograms simultaneously by the OSA (YOKOGAWA AQ6370B) and the oscilloscope and try to find the relation between the frequency and the time. Figure 7 shows a pair of measurement results. Figure 7(a) shows the results measured by the OSA. We find that the modulation frequency is not constant, and there is a widest fringe at about 191.4 THz. At the position of the widest fringe, the modulation frequency is the lowest. The fringe number is about 50. Figure 7(b) indicates the results measured by the oscilloscope. Similar to that in Fig. 7(a), there is also a widest fringe at about in the waveform. Limited by the resolution, we find that 16 fringes can be clearly resolved.
Figure 7.(a) Measurement results using the OSA. (b) Measurement results using the oscilloscope.
When the target mirror is moved far away, both the widest fringes on the OSA and the oscilloscope are shifted to the right side. We move the target mirror step by step, process both the data, and measure the exact position of the widest fringe. In the position of the widest fringe, the first-order derivative of the unwrapped phase is equal to zero, i.e., the inflection point. The mapping from the frequency to the time is shown in Fig. 8 and can be fitted as , where is the slope and is the offset. and are the time (in s) and frequency (in Hz) values, respectively. Please see the Appendix for more information. In Fig. 8, the pink solid circles are the raw data, and the black line indicates the fitted curve. We find that time is nearly linearly related to the frequency. Therefore, if using the time as the horizontal axis, Eq. (8) can be updated to
Figure 8.Relation between the time and the frequency. The pink solid circles show the raw data and the black line indicates the fitted curve. We find that time is linearly related to the frequency.
3.1.1 Determination of the Pulse Index Difference M
As mentioned before, the position changes of the pulses from the local oscillator and the signal source are different due to the long fiber link. Considering the case of the reference pulses, the pulse index difference can be measured by changing the repetition frequency, which is where is the change of the distance value due to the change of the repetition frequency. Figure 9 shows the experimental results for the determination of . When the repetition frequency is 250.0300035 MHz, the spectrogram is shown in Fig. 9(a), and we can find the widest fringe is located at about 191.2 THz. The widest fringe is shifted to about 191.4 THz as shown in Fig. 9(c) when the repetition frequency is changed to 249.99951875 MHz.
Figure 9.Spectrograms corresponding to the different repetition frequencies. (a) Spectrogram when the repetition frequency is 250.0300035 MHz. (b) AC part of the spectrogram in panel (a). (c) Spectrogram when the repetition frequency is 249.99951875 MHz. (d) AC part of the spectrogram in panel (c). The position of the widest fringe is shifted to the right side (higher optical frequency) when the repetition frequency decreases slightly. This is because the pulse-to-pulse interval increases when decreasing the repetition frequency.
Here, we would like to demonstrate the data process in detail to obtain the distance information, which is shown in Fig. 10. Based on the Hilbert transform, the wrapped phases of the signals shown in Figs. 9(b) and 9(d) can be obtained as shown in Figs. 10(a) and 10(b), respectively. Please note that a short-time Fourier transform can be also used to extract the phase information, and the tradeoff between the time resolution and frequency resolution should be considered. We find the phases change the most slowly at the widest fringe. Figure 10(c) indicates the unwrapped phases corresponding to the results in Figs. 10(a) and 10(b). The black solid line represents the unwrapped phase when the repetition frequency is 250.0300035 MHz, and the red solid line shows the phase when the repetition frequency is 249.99951875 MHz. Figure 10(d) shows the phase difference between the two phases in Fig. 10(c), which is a straight line. The distance can be measured from Eq. (5), which turns out to be 15.06 mm. Inserting all the parameters into Eq. (13), the value can be determined to be 103, and can be also obtained in this way.
Figure 10.Data process of the spectrograms in the frequency domain. (a) Wrapped phase of the spectrogram in Fig. 9(b). (b) Wrapped phase of the spectrogram in Fig. 9(d). (c) Unwrapped phases. The black solid line represents the unwrapped phase before changing the repetition frequency, and the red solid line shows the phase after changing the repetition frequency. The unwrapped phase is shifted to the right side. (d) Phase difference between the two phases in panel (c). We find a straight line whose slope can be used to determine the distances, despite that the unwrapped phase is not linearly related to the optical frequency.
3.2 Absolute Distance Measurement Using Real-Time Chirped Pulse Interferometry
In this subsection, we measure the distances using real-time chirped pulse interferometry. The environmental conditions are 22.5°C, 98.8 kPa, and 63.1% humidity, and the group refractive index is 1.00026026 corrected by the Ciddor formula.72Figure 11(a) indicates the waveform at the initial position, and Fig. 11(c) shows the AC part in one period of about 4 ns. The repetition frequency is 250.0300035 MHz at this time. After the target mirror is shifted by about 100 mm far away, we change the repetition frequency to 249.6255035 MHz so that the spectrograms can appear again on the oscilloscope. Figures 11(d) and 11(f) show the waveforms corresponding to the new position at about 100 mm. We use Hilbert transform to measure the phase of the waveforms shown in Figs. 11(c) and 11(f), and the phases are then unwrapped. The unwrapped phases are shown in Figs. 11(g) and 11(h), respectively. The phase difference is indicated in Fig. 11(i), which is a straight line, and the slope can be measured as . Here, the distance can be calculated by Eq. (12) as
Figure 11.(a) Waveform with the target mirror at the initial position. (b) Waveform in one period of about 4 ns at the initial position. (c) AC part of the waveform in panel (b). (d) Waveform with the target mirror shifted by 100 mm. (e) Waveform in one period of about 4 ns after shifting the target mirror by 100 mm. (f) AC part of the waveform in panel (e). (g) Unwrapped phase of the waveform in panel (c). (h) Unwrapped phase of the waveform in panel (f). (i) Phase difference between the phases in panels (g) and (h), which is a straight line. (j) Wrapped phase of the signal in panel (c). (k) Wrapped phase of the signal in panel (f). Note that we change the horizontal axis to the wavelength, for the convenience of the phase measurements of the chosen wavelengths.
The results in this step are shown in Figs. 12(a) and 12(c). The horizontal axis is the reference distances, and the vertical axis is the difference between our measurements and the reference values. We first move the stage with a 0.1-m step size in the 1-m range to verify the dead-zone removal, and then, we move the stage with a step size of 5 m in the 50-m range. At each position, we measure the distances 1000 times (for just in fact), and the colorful solid points are the scatters of each measurement. The measuring time for each measurement is about 4 ns, corresponding to the repetition frequency of the laser frequency comb. We find that the measurement uncertainty can be below at this step. In the second step, i.e., the fine measurement, the synthetic wavelength should be larger than . We choose the wavelengths of 1560 and 1570 nm to generate the synthetic wavelength. Correspondingly, the group refractive index is 1.00026027. The synthetic wavelength is therefore , . Based on Eq. (9), the distance can be determined. We first determine the integer as
Figure 12.Experimental results of the distance measurement. (a) Results of the coarse measurement with a 0.1-m step size in the 1 m range. The colorful solid points show the scatters of each measurement. (b) Results of the fine measurement with a 0.1-m step size in the 1 m range. The red x markers show the scatters of 1000 measurements. The black solid points indicate the average value, and the error bar shows twice the standard deviation. (c) Results of the coarse measurement with a 5-m step size in the 50 m range. The colorful solid points show the scatters of each measurement. (d) Results of the fine measurement with 5-m step size in the 50 m range. The red x markers show the scatters of 1000 measurements. The black solid points indicate the average value, and the error bar shows twice the standard deviation.
Then, we calculate the fraction . The wrapped phases are shown in Figs. 11(j) and 11(k), corresponding to the spectrograms in Figs. 11(c) and 11(f), respectively. In Fig. 11(j), the phases at 1560 and 1570 nm are and , respectively. In the case of Fig. 11(k), the phases at 1560 and 1570 nm are 1.735 and , respectively. Consequently, can be calculated as
Finally, the distance can be determined to 103.237 mm. The results of the fine measurement are shown in Figs. 12(b) and 12(d), for 1 and 50 m range, respectively. The scatters of 1000 measurements are indicated by the red x markers. The black solid points represent the average value of the 1000 measurements, and the error bar shows twice the standard deviation. The green dashed lines show the limit of the measurement uncertainty, which is improved to be below .
We carry out long-term experiments for with 200,000 measurements to examine the precision limit. Figure 13 shows the Allan deviation at a 50-m distance. The Allan deviation is at an averaging time of 4 ns, 25 nm at , and can achieve 2 nm at averaging time. These results show that nanometer-level precision can be realized.
Figure 13.Allan deviation at different averaging time.
Real-time chirped pulse interferometry is able to measure the distances with ultrafast speed, which is only limited by the repetition frequency of the laser source. The experimental configuration is shown in Fig. 14. The measurement beam is injected into the circular and focused on the spinning disk. After being reflected by the spinning disk, the measurement beam is combined with the local oscillator, stretched by a highly dispersive fiber, and finally detected by a fast photodetector. The radius of the spinning disk is about 15 cm, and the rotating speed is about 10,000 rpm (r/min). Therefore, the line speed of the edge is about . Several grooves with different depths are designed on the surface of the disk. Please note that the length of the dispersive fiber here is about 20 m because the groove depths are not very large in the experiments. Here, the groove depths are about 2, 4, and 6 mm. The measurement results of these grooves are shown in Fig. 15. The blue points represent the results using real-time chirped pulse interferometry, and the red solid points indicate the results measured by a coordinate measuring machine (CMM, Leica PMM-Ultra). The difference between the two measurements is below .
Figure 14.Experimental setup of ultrafast distance measurement. The target is a spinning disk with grooves of different depths.
Figure 15.Experimental results of ultrafast distance measurement. The blue points represent the results using real-time chirped pulse interferometry, and the red points indicate the results measured by a coordinate measuring machine.
The final measurement results are based on Eq. (9), which involves the parameters of the integer part , the fractional part , the synthetic wavelength , and the group refractive index . The integer part can be precisely determined with uncertainty better than 0.5 and has no contributions to the measurement uncertainty. The uncertainty can be calculated by
In Eq. (17), the first term on the right side is related to the synthetic wavelength . In our experiments, the laser frequency comb is referenced to the Hydrogen maser with stability at 1 s, and each frequency marker holds the same frequency stability. We use a well-calibrated optical spectrum analyzer to measure the wavelengths. Therefore, it is reasonable and sufficient that the uncertainty due to the clock stability can be evaluated to be . The precise mapping from the frequency domain to the time domain can also make a contribution to the first term, which is related to the stability of the long fiber and the stability of the clock source for the oscilloscope. The long fibers used in the detection unit are well vibration-isolated and temperature controlled, and the temperature drift can achieve 1 mK over 2 days. In addition, the oscilloscope is locked to the Hydrogen maser. We measure the mapping for 2 days continuously, and for 1565 nm, the stability of the corresponding time can reach 0.013 fs, which corresponds to uncertainty. The second term is related to the group refractive index . We measure the air refractive index using the Ciddor formula based on the environmental sensor network. The inherent uncertainty of the empirical formula is , and the measurement of the environmental conditions also plays an important role. With consideration of the uncertainty of the sensors, the environmental stability, and the environmental inhomogeneity, the uncertainties of the temperature, air pressure, and humidity are 28 mK, 12 Pa, and 1.6%, which respectively correspond to , , and uncertainty of air refractive index. The combined uncertainty of the air refractive index can thus reach (), which is for the distance uncertainty. The third term is due to the measurement of the fractional part, which can be estimated by the standard deviation. At each position, we measure the distance by 1000 times with ultrafast measurement speed, and the standard deviation is below . We use twice the standard deviation to evaluate this part, which is less than . Because the frequency comb laser and the reference distance meter do not share the same target mirror, an Abbe error could exist. The Abbe error is always below along the 50-m travel, corresponding to a yaw error of the rail. In addition, the stability of the translation stage is below over 2 h. Finally, the combined uncertainty of the distance measurement is , which can well cover the results in Fig. 12(b). The uncertainty evaluation is summarized in Table 1. We consider that a more stable environment will be helpful to further improve the uncertainty.
Sources of the measurement uncertainty
Value
Due to the synthetic wavelength
Due to the air refractive index
Temperature uncertainty
28 mK
Air pressure uncertainty
12 Pa
Humidity uncertainty
1.6%
Due to the fractional part
Abbe error
Due to the mapping from the frequency domain to the time domain
Due to the long optical rail
Combined uncertainty ()
Table 1. Uncertainty budget of the absolute distance measurement.
Further, we would like to give an analysis of the measurement resolution, which is very important in practical distance measurement. In general, basically, the measurement resolution is related to the linewidth of the optical source, the phase resolution of the measurement system, and the short-term stability of the environment. Right now, the optical source can be locked to a reference cavity or an atomic clock (the Hydrogen maser in this work), and the resulting linewidth of the optical source can reach Hz or even sub-Hz,73 corresponding to a much better than pm resolution. Here, the phase resolution of the phasemeter could make the main contribution. In our work, we use the oscilloscope and the post-data process to measure the phases. The oscilloscope is locked to the Hydrogen maser, and the digital noise and the ADC (AD card) noise can be neglected. We find that smaller synthetic wavelengths can lead to better length resolution. If we use a single wavelength to measure the distances, the measurement resolution can be expected to be better. However, generally speaking, coherent averaging is needed to reach such a high performance for high-speed measurement. Of course, there are other methods (e.g., optical method) for the phase detection. Finally, the stability of the environment could affect the measurement resolution. In the case of long-distance measurement, it is difficult to maintain the environment’s homogeneity and stability. Despite this, the nanometric resolution has been reported in the previous reports.30,31
In discussion, the distances can first be precisely determined via the spectrograms shown in Fig. 9. In this case, the mapping from the frequency domain to the time domain is not required. Therefore, the calibration step in Fig. 8 is not needed anymore. In general, the schemes based on the chirped pulse interferometry involve one calibration step, so that the distance can be measured via the position of the widest fringes. We would like to show that the distance can be also measured by the slope of the phase difference in the chirped pulse interferometry, even if the phase of one spectrogram is not linear, but quadratic. The main advantage of the real-time chirped pulse interferometry is that the measurement speed can be improved to be recorded high, i.e., 4 ns per measurement. Second, in our experiments, one long fiber link is involved to stretch the femtosecond pulses in the local oscillator. The active stabilization of the fiber in the local oscillator is not strictly required. The two spectrograms used to measure the distances always share the same fiber in the local oscillator. Therefore, the fiber fluctuations can be canceled out in real time. Despite this, chirped fiber Bragg grating (CFBG) is preferable, considering the dispersion, stability, and future integration. Finally, we use a 90-m dispersion compensation fiber in the local oscillator, and therefore the repetition frequency should be changed to remove the dead zones. In fact, at the very beginning, we used 300-m dispersion compensation fiber in the local oscillator, and the adjustment of the repetition frequency is not needed in that case. The problem is that fewer fringes can be obtained on the oscilloscope with such a long fiber because the sampling rate of the oscilloscope is limited. Another is that the stabilization of such a long fiber is not easy, and our experimental results also show that shorter fiber can lead to a better performance of distance measurement. Please find more details in Ref. 70. In addition, we use a fully stabilized frequency comb in our experiments, and the locking circuits indeed make the whole system bulky and expensive. We consider that the stabilization of the repetition frequency is needed. If the repetition frequency is free, the pulse-to-pulse interval will be free, and the spectrograms cannot be sufficiently stable. The position of the widest fringe will fluctuate, leading to performance degradation. The locking could not be strictly required because the spectrograms in chirped pulse interferometry are related to the temporal positions of the wave packets. If the optical phase of one wavelength is used in the distance measurement, the locking is also suggested. We would like to discuss the implementation of the soliton microcombs in real-time chirped pulse interferometry. The repetition frequency of microcomb is often high at tens of GHz because of the small footprint. If with 10 GHz repetition frequency, the pulse period is 100 ps. Consequently, the sample number is 8 with an sampling rate, which makes the observation of the spectrograms inaccessible. Therefore, to observe the birth of microcomb solitons is rather difficult. Next, we give a brief discussion of the dual-comb ranging system. Dual-comb ranging is powerful, mature, and easy to use. One limitation could be that we need two well-locked combs. Recently, optical ranging based on two free combs has been reported,74 which can greatly reduce the system complexity. Very recently, a dual-comb system based on one cavity has been demonstrated, which is more interesting and cheap.22,75 More important is that the coherence between the two combs can be inherently maintained due to the common pump and common cavity.
In this work, we describe a method based on real-time chirped pulse interferometry, capable of ultrafast, precise absolute distance measurement without dead zones along the measurement path. The local oscillator is strongly chirped by a highly dispersive fiber so that the measurement pulses can always leave footprints on the spectrograms to remove the dead zones. Due to the strong chirp, the spectral phase of one spectrogram is not linearly correlated to the optical frequency. Despite this, the phase difference between two spectrograms is still a straight line, whose slope can be used to measure the distances. Next, virtual synthetic wavelength interferometry is exploited to finely determine the distances. In contrast to the previous reports,62,63 the step to calibrate the position of the widest fringe is not required. We develop a real-time OSA based on dispersive Fourier transform. Because of the existence of the widest fringe, we can observe the spectrograms on the oscilloscope at any distance, which can relax the restriction of the time resolution of the scope. We carried out the experiments in the metrology lab, and the comparison to the reference distance meter shows that the difference can be well below . There are no dead zones in the measurement path. This level of measurement uncertainty can satisfy most of the applications actually. A spinning disk with about line speed can be imaged due to the record high measurement speed. Our method offers a unique and comprehensive combination of non-dead zones, high speed (4 ns per measurement), high precision (nanometer level), large ambiguity range (up to kilometer level by slightly changing the repetition frequency), and with only one comb source. Our system is able to provide a solution for the fields, where ultrafast and precise detection is needed.76,77
To date, the technique of frequency combs is becoming mature and has seen a wealth of applications in both science and technology. However, most of the applications based on the combs are only at the level of laboratory demonstration, and there is still a long way to go to realize the practical applications in the industry. If out of the lab, the air refractive index is going to make a great contribution to the final uncertainty. The two-color or three-color method can be used to correct the air refractive index in real time in this case.78,79
5 Appendix: Materials and Methods
Here, we would like to give a theoretical description of the pulse broadening in the chirped pulse interferometry in detail. The fs-class pulses will be broadened when traveling in a dispersive media, which is the dispersion compensation double clad fiber (DCF) in this work. If the spectrum of the frequency comb can be expressed by , the electrical field of one pulse can be thus calculated based on the inverse Fourier transform as where is the angular frequency, and the initial phase is zero. After propagating through the DCF, an additional phase will be introduced for each mode due to the length and the refractive index (i.e., the dispersion) of the fiber. This additional phase can be expressed as where is the coefficient of the group velocity dispersion (GVD) at different orders, is an integer, is the center frequency, and is the fiber length. Consequently, the spectrum of the laser source can be updated to
Therefore, the electrical field of the pulse can be given by
Inserting Eq. (19) into Eq. (21), we can reach where is the spectral width. Here, we finally have got an expression of the electrical field after the laser pulses travel through the DCF. We find, larger , larger , and larger can result in a larger pulse width.45
The relation between the optical frequency and the time can be obtained by differentiating Eq. (19) with respect to , which is
We find that, if up to second-order dispersion coefficients are considered, the relation between the optical frequency and the time is linear. If higher-order dispersion coefficients are involved, the curve is not a straight line.
We use the dispersion parameters provided by the fiber manufacturer to calculate the dispersion coefficients (up to the third order is sufficient), and the results are shown in Table 2.
Using the parameters in Table 2, we simulate the mapping from the frequency domain to the time domain, and the results with different orders of dispersion coefficients are shown in Fig. 16. We find that, if up to second-order dispersion coefficients are considered in the simulations, the relation between the optical frequency and the time is linear. If higher-order dispersion coefficients are involved, the curve is nearly a straight line. Therefore, we can use the linear relation between the optical frequency and the time to determine the distances. This imperfect linearity could introduce uncertainties to the distance measurement, but our results show that high-precision measurement can be realized in this situation. The linear chirped fiber Bragg grating can be used in the future to further improve the measurement performance.
Figure 16.Relation between the optical frequency and the time, taking into account the different orders of dispersion coefficients.
 AI Video Guide
AI Video Guide  AI Picture Guide
AI Picture Guide AI One Sentence
AI One Sentence